The DIY 2DOF+TL Project Not for Sale
Sorry for the lazy guys my 2DOF+ZTLS simulator is NOT FOR SALE!
I'm happy to share with you my concept and design and give you all the needed info to help you to build a very good car racing motion simulator but I'm not going to create and sell a ready-to-use hardware simulator kits.
Buy it from FREX Japan if you want a complete solution and If a manufacturer is interested he can contact me, but for now this project is for PERSONAL USE ONLY under CC BY-NC-SA 4.0 license and forbidden for any commercial use. Read the license HERE.
However, this DIY simulator project is easy to build (although some skill with aluminum frames are needed), inexpensive compared to PRO solution (which are overpriced IMHO), suitable for casual user for entertainment to real PRO driver for training and track learning. Optimized for MotionMax software 2DOF (MMX2) which is powerful and very easy to use with more than 50 games/simulations supported.
The ZTLS (Zappadoc Traction Loss System)
I created the ZTLS (Zappadoc Traction Loss System) to get a compact TL system and ultra responsive.
The ZTLS is under Creative Commons Attribution-Noncommercial-ShareAlike 4.0 International (CC BY-NC-SA 4.0) license and requires my written consent to be marketed or used in any business/commercial context.
In short, it's for *PERSONAL USE ONLY* and forbidden for any business/commercial. Read the license HERE.
The 2DOF is good for car racing simulation, the braking/acceleration, bumps and track relief are restored superbly but this doesn't give you all the force involved. The lack of heave DOF is acceptable on racing car but the lateral motion on oversteer / understeer are missing and the simulator fails to restore natural driving feeling to the driver... A real car simulator needs an efficient traction loss (TL) system.
The main issue of almost all traction loss system available today in racing simulator are:
- the software which are unrealistic and overreacting, spectacular okay! but not realistic, you're a racer driving a car not in a pinball machine... I wonder if developers of these "pinball" software really drove a race car in their life?
- also, A BIG PROBLEM is the use of a "articulation/ball joint" between the structure of the simulator and the dedicated TL actuator to compensate for the angle change when actuator is moving forward and backward.

This ball joint (usually a rod end) takes some time to deploy, this "moment" of deployment of the joint before the simulator actually moves introduces latency, the longer the rod with knee of the ball joint, the more the latency increases, this is a big problem.
ZTLS is directly in contact with the simulatorThe TL system must be ultra responsive, this is why the ZTLS is directly in contact with the simulator (no ball joint).
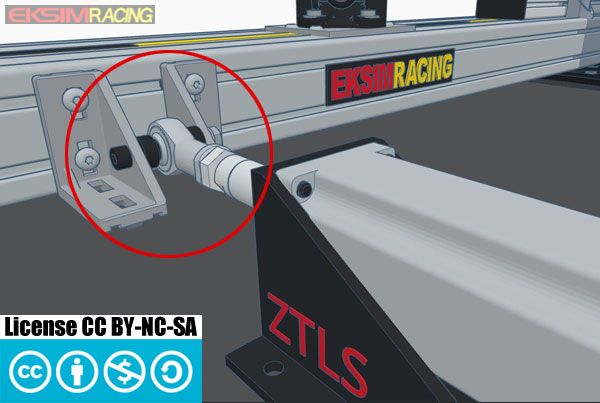
Efficient and with a very fast response combined with MotionMax Manager, the ZTLS allows the actuator to rotate on itself using a swivel plate and during the rotation the actuator is continuously in contact with the simulator structure and keep pushing or pulling with zero latency.

